بهترین ربات های فضایی در گذشته، حال و آینده
(Pocket-lint) – از زمان مسابقه بدنام فضایی در دهه 1960، آژانسهای فضایی در سراسر جهان روباتهای مختلفی را ساخته، آزمایش و پرتاب کردهاند که هر کدام برای آموزش بیشتر در مورد جو، ماه، منظومه شمسی و فراتر از آن طراحی شدهاند.
از اولین ماهنورد اتحاد جماهیر شوروی در دهه 1970 تا پرتاب مریخنوردها، این رباتها وظایف بسیار خطرناک یا پیش پا افتاده برای انسان را انجام میدهند و از دورافتادهترین و شدیدترین مناطق سیارات دوردست بازدید میکنند.
برای تجلیل از همه چیزهایی که آموختهایم، و چیزهایی که هنوز کشف نکردهایم، فهرستی از بهترین رباتهای فضایی را گردآوری کردهایم.


لونوخود 1
یک سال پس از اینکه نیل آرمسترانگ ناسا اولین گام ها را بر روی ماه برد، اتحاد جماهیر شوروی اولین ماه نورد روباتیک موفق را به نام لونوخود 1 فرستاد.
از نوامبر 1970 تا تابستان سال بعد، لونوخود 1 بیش از 10 کیلومتر در سطح ماه سفر کرد و از راه دور از اتحاد جماهیر شوروی کار کرد.
برای نشان دادن این دستاورد، فرصت مریخ نورد ناسا تنها 12 کیلومتر را در شش سال پیمود. Lunokhod 1 در طول روز با انرژی خورشیدی و در شب با یک بخاری حرارتی پولونیومی کار می کرد تا در دمای -150 درجه سانتی گراد زنده بماند. این اطلاعات در مورد خاک ماه و برخی از اولین نماهای نزدیک از دهانه های ماه را ارسال کرد.
کالسکه ماه آپولو 15
اولین ماه نورد ناسا، یا کالسکه ماه، تا زمانی که Lunokhod 1 ارسال خود را به پایان رساند، در ژوئیه 1971، فرود نیامد.
کالسکه ماه آپولو 15 که به عنوان بخشی از ماموریت سرنشین دار آپولو 15 به فضا پرتاب شد، اولین وسیله نقلیه ای بود که روی ماه رانده شد.
زیبایی مریخ نورد قابل راندن این بود که میتوانست به فضانوردان کمک کند تا فراتر از محل فرودشان کاوش کنند، به این معنی که میتوانستند نمونههای عجیبتری را جمعآوری کنند. و در طول ماموریت، این LRV خاص در مجموع 27 کیلومتر – یا سه ساعت و دو دقیقه رانندگی کرد. از نظر فناوری، اساس هر مریخ نوردی که از آن زمان ساخته و پرتاب شده است را تشکیل داد. در این تصویر که توسط فرمانده دیو اسکات گرفته شده است، خلبان ماژول جیم اروین با مریخ نورد با کوه هدلی در پس زمینه تصویر شده است.
مهاجر
در اولین بار، Sojourner مریخ نورد رباتیک اصلی بود که روی مریخ فرود آمد. این مریخ نورد که به نام Sojourner Truth، فعال آفریقایی-آمریکایی نامگذاری شد، منطقه ای از سیاره سرخ را در اطراف محل فرود خود به نام Ares Vallis کاوش کرد.
این منطقه مسطح بود و به همین دلیل آن را برای فرود مریخ نورد امن می کرد و تصور می شد که محل وقوع سیل باستانی بوده است. از زمان فرود در 4 ژوئیه 1997 تا ارسال نهایی آن در دو ماه بعد، Sojourner 550 تصویر از مریخ را ارسال کرد و همچنین بینش های شگفت انگیزی در مورد نوع خاک، بادها و آب و هوا نشان داد.
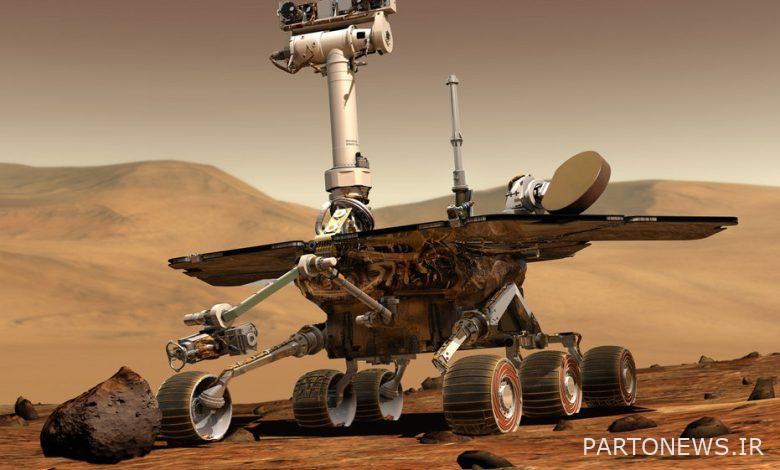
روور فرصت
15 سال پس از انتظار پایان ماموریت، مریخ نورد فرصت نهایی خود را در 10 ژوئن 2018 به مقر ناسا ارسال کرد.
آپورچونیتی در ژانویه 2004 در منطقه مریدیانی پلانوم مریخ فرود آمد، 20 روز پس از فرود کاوشگر روح برادرش در دهانه گوسف در آن سوی سیاره. Spirit تقریباً 8 کیلومتر قبل از پایان مأموریت خود در می 2011 ثبت نام کرد، در حالی که Opportunity رکورد 45 کیلومتر را شکست.
در طول سفرهای خود بیش از 217000 تصویر جمع آوری کرد. این سلفی آپورچونیتی در حالی گرفته شده است که با استفاده از تصویرگر میکروسکوپی مریخ نورد در 5000مین روز مریخی خود از طریق “دره استقامت” در دامنه دهانه اندیور در حال حرکت بود.
مریخ نورد کنجکاوی
احتمالاً معروفترین مریخنورد که هنوز در حال انجام وظیفه است، کنجکاوی است. این سلفی که در تصویر دیده می شود، مریخ نورد به اندازه یک ماشین را در ریج Vera Rubin در دهانه گیل در مریخ نشان می دهد.
کنجکاوی در 6 آگوست 2012 بر روی مریخ فرود آمد و در ابتدا به مدت دو سال راه اندازی شد. تنها شش ماه پس از فرود، ناسا این ماموریت را “به طور نامحدود” تمدید کرد.
این دستگاه برای ارزیابی «قابلیت سکونت» مریخ ساخته شده است و دارای بزرگترین و پیشرفتهترین مجموعه ابزارهای علمی است که تا به حال به سطح مریخ ارسال شده است. این ابزارها میتوانند نمونههای سنگی گرفته، شکلگیری و ساختار آنها را تجزیه و تحلیل کنند و دادهها را به زمین ارسال کنند.

دکستر
کمی نزدیکتر به خانه، دکستر است – یک ربات فضایی «تلمنیپلاتور» دو دستی که توسط آژانس فضایی کانادا (CSA) برای کمک به ایستگاه فضایی بینالمللی (ISS) ساخته شده است. اولین وظیفه برنامه ریزی شده خود را در فوریه 2011 تکمیل کرد و به فضانوردان در تعمیر و نگهداری ایستگاه کمک می کرد.
به طور خاص، دکستر با کارهای سخت و معمولی که باید هم در داخل و هم در خارج از ایستگاه انجام شوند، مقابله میکند و در اینجا در قسمت بیرونی ایستگاه فضایی بینالمللی در حال جایگزینی یکی از دوربینهای خارجی تصویر شده است. از زمین توسط CSA کنترل می شود، که فضانوردان را آزاد می کند تا زمان بیشتری را برای آزمایش های علمی صرف کنند. هر یک از بازوهای آن دارای هفت مفصل است که می توانند به سمت بالا و پایین حرکت کنند و می توانند بچرخند. سپس هر دست شامل یک آچار، دوربین و چراغ ها و یک رابط برای اتصال برق، داده و ویدئو می باشد.
روبنورد
در جای دیگری در ایستگاه فضایی بینالمللی، پروژه Robonaut با فرستادن یک انسان نما برای “زندگی” در کنار خدمه فعلی ایستگاه، تحقیقاتی را در مورد فناوری رباتیک انجام داده است.
دن بربنک، فضانورد ناسا، که در طول اکسپدیشن 30 فرمانده بود، با روبونات 2 در آزمایشگاه سرنوشت ایستگاه فضایی بینالمللی تصویر شده است.
Robonauts روباتهای انساننمای ماهری هستند که در مرکز فضایی جانسون ناسا در هیوستون، تگزاس ساخته شدهاند. مدل اصلی اخیراً با دو “پا”، پردازندهها و حسگرهای توانمندتر ارتقا یافته است و به اصطلاح Robonaut 2 وظیفه دارد تا از طریق تمرینات پرداخت مورد نیاز برای نگه داشتن ایستگاه فضایی بینالمللی در مدار کار کند. این وظایف شامل کارهای ساده، تکراری یا خطرناک می شود.
ورزشکار
Athlete توسط آزمایشگاه رانش جت ناسا ساخته شده و در حال آزمایش است.
نام آن مخفف All-Terrain Hex-Legged Extra-Terrestrial Explorer است و یک وسیله نقلیه روباتیک است که قادر به غلتیدن و قدم زدن در انواع زمین هایی است که در ماه، مریخ و فراتر از آن دیده می شود.
این برای کمک به ماموریت های رباتیک و سرنشین دار، حمل و نقل و سپرده گذاری محموله ها طراحی شده است. برای مثال، این نسخه اول میتواند به ایستگاههای سوخترسانی متصل شود و نسخههای بعدی میتوانند حتی به فضاپیماهای بیشتری متصل شوند و همچنین 100 برابر سریعتر از مریخنوردهای اکتشافی مریخ حرکت کنند و تقریباً در هر زمینی از جمله سطوح صخرهای عمودی حرکت کنند.
مریخ نورد استقامت 2020
همه مریخ نوردهایی که قبلا آمده بودند برای ماموریت بزرگ بعدی مریخ ساخته شده اند. در 30 ژوئیه 2020، مریخ نورد بعدی به فضا پرتاب شد و مأموریت خود را بر روی سطح سیاره سرخ آغاز کرد.
پشتکار ظاهری شبیه به کنجکاوی دارد اما با طراحی چرخ توانمندتر و همچنین متهای که برای هستهگیری نمونههای سنگها و خاک مریخ استفاده میشود. این ربات حدود 10 فوت طول، 9 فوت عرض و 7 فوت ارتفاع دارد. بر روی آن همه فن آوری از جمله 23 دوربین مختلف برای پیمایش مریخ و بررسی محیط آن وجود دارد.
این اولین باری است که یک مریخنورد دارای چنین متهای است و این به دانشمندان ناسا کمک میکند تا زمین، توپوگرافی و تاریخ مریخ را بیشتر درک کنند.
بالگرد مریخ Ingenuity
این است بالگرد مریخ Ingenuityهلیکوپتر کوچکی که همراه با مریخ نورد Perseverance به مریخ فرستاده شده است. این ماشین کوچکی است که در مریخ نیمی از وزنی که روی زمین انجام می دهد خواهد بود. نبوغ جالب است زیرا از نظر فنی اولین وسیله نقلیه ای است که در سیاره دیگری پرواز می کند.
پرواز بر روی مریخ نیز چالش برانگیز خواهد بود زیرا اتمسفر آنجا 99 درصد چگالی کمتری نسبت به اینجا روی زمین دارد. این بدان معناست که باید سبک باشد و روتورها باید بسیار بسیار سریعتر از یک هلیکوپتر روی زمین بچرخند. همچنین باید در آب و هوای سخت نیز جان سالم به در ببرد، زیرا دمای هوا در طول شب به منفی 130 درجه فارنهایت (منهای 90 درجه سانتیگراد) می رسد.
Ingenuity تنها می تواند 90 ثانیه در هر بار پرواز کند و از پنل های خورشیدی برای شارژ مجدد در طول روز استفاده می کند تا روز بعد دوباره پرواز کند. همچنین باید بیشتر به صورت خودمختار پرواز کند زیرا رسیدن سیگنالهای کنترلی از زمین به مریخ بسیار طول میکشد. هر فرمانی باید از قبل ارسال شود و هلیکوپتر خودش به ایستگاه های بین راه پرواز می کند
اختربی ها
در حالی که برخی از رباتهای موجود در این فهرست در سیارات مختلف هستند و وظایف فوقالعادهای را انجام میدهند، برخی فقط در مأموریتهای روزانه کمک میکنند.
فضانوردها سیستمهای روباتیک «پرواز آزاد» هستند که برای کمک به کاهش بار کاری فضانوردان در ایستگاه فضایی بینالمللی ساخته شدهاند. آنها با عملکرد مستقل یا با کنترل از راه دور و تکمیل کارهایی مانند موجودی، مستندسازی آزمایش ها و موارد دیگر کمک می کنند.
آنها حتی میتوانند با فنهای برقی که میتوانند آنها را در اطراف ایستگاه حرکت دهند و ترکیبی از دوربینها و حسگرها به دور خود بچرخند.
ویومیترا با نام دوست فضایی
از هند یک ربات انسان نمای فضاپیما می آید که به گونه ای طراحی شده است که شبیه یک ماده باشد و قرار است بخشی از یک ماموریت آزمایشی بدون خدمه باشد.
سازمان تحقیقات فضایی هند قصد دارد از Vyommitra به عنوان راهی برای درک بهتر تأثیرات بی وزنی و تشعشعات بر بدن انسان در مدت زمان طولانی استفاده کند.
این می تواند برخی از وظایف از جمله کنترل حمایت از زندگی را انجام دهد و می تواند انسان ها را بشناسد و با آنها درگیر شود و همچنین از آنها تقلید کند.
نوشته ویکتوریا وولاستون ویرایش توسط Adrian Willings.